|
 |
|
 |
 |
 |
 |
 |
 |
Un Sottomarino R/C
Il Project 877 - Paltus o classe Kilo
1 / 18 
2 / 18 
3 / 18 
4 / 18 
5 / 18 
6 / 18 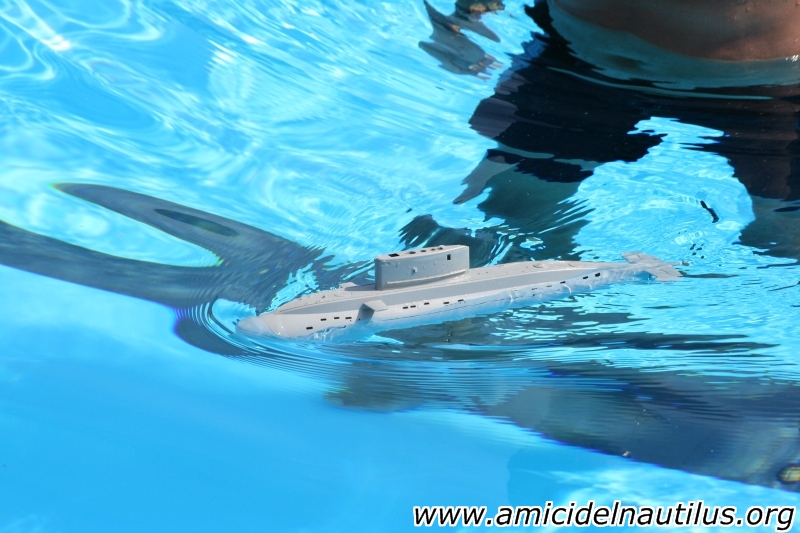
7 / 18 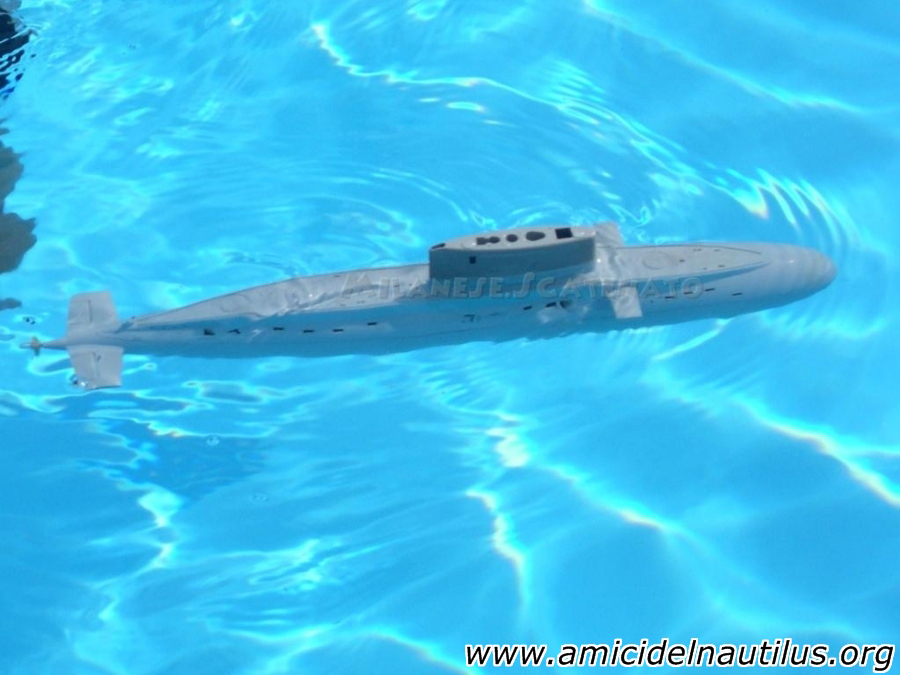
8 / 18 
9 / 18 
10 / 18 
11 / 18 
12 / 18 
13 / 18 
14 / 18 
15 / 18 
16 / 18 
17 / 18 
18 / 18 
❮
❯
|
|
L´originale |
Il sottomarino Project 877 - Paltus (Classe Kilo) è progettato per i compiti di caccia ai sottomarini (SSK), missioni anti nave e protezione delle basi navali, impianti costieri e anche come pattugliatore.
Il Kilo è considerato uno dei sottomarini diesel più silenziosi al mondo.
Il sottomarino si compone di sei compartimenti stagni separati da paratie trasversali in uno scafo pressurizzato doppio che garantisce ottime doti di galleggiabilità anche con un compartimento allagato.
I piani di quota anteriori sono posizionati nella parte superiore dello scafo di fronte alla vela, e sono retraibili per le manovre in porto.
A poppa con una configurazione a "T" rovesciata vi sono il timone di direzione e i piani di quota posteriori oltre all’elica
Il comando e il controllo dei sistemi di fuoco si trovano nella sala di controllo principale, che è isolata dagli altri compartimenti.
CARATTERISTICHE
|
| Nome: |
Project 877 - Paltus |
| NATO code: |
KILO class |
| Progettista: |
Rubin |
| Cantiere costruttore: |
Admiralty Shipyard (Sudomekh) |
| Dislocamento: |
2,300-2,325 ton in superficie |
|
3,076-3,950 ton a pieno carico immerso |
| Velocità: |
10-12 Nodi in superficie |
|
17-25 Nodi in immersione |
| Dimensioni: |
- 72 m lunghezza
- 9,9 m baglio massimo
- 6,5 m Altezza
|
| Propulsione: |
Diesel/Elettrico
- 2 x 1.000 kW generatori Diesel
- 1 x 5.500 hp propulsione elettrica
|
| Elica: |
1 x 7 pale, passo fisso |
| Profondità operative: |
- 240 metri quota operativa
- 300 metri quota massima
- 17,5 metri quota periscopio
|
| Autonomia: |
- 6.000 miglia con snorkel a 7 nodi
- 400 miglia in immersione a 3 nodi
- 12,7 miglia in immersione a 21 nodi
- 45 giorni Sea Endurance
|
| Armamento: |
Missili: 8 Strela-3 (SA-N-8 Gremlin) o 8 Igla (SA-N-10 Gimlet) |
| Siluri: |
6 Tubi lanciasiluri da 533 mm |
| Munizioni: |
18 Siluri VA-111 o 24 mine |
| Sistemi: |
- Comunicazioni radio
- Centro tattico
- Sistema di navigazione
- 1 MRK-50 (Snoop Tray-2) radar di rilevamento di uso generale
- MGK-400 Rubikon (Shark Teeth) Sonar attivo/passivo
- 2 Periscopi (uno per il comandante, uno per la difesa aerea)
|
Il modello |
Per questa realizzazione è stata utilizzata come base la scatola di montaggio del sottomarino KILO della Trumpeter in scala 1/144.
Le dimensioni del modello permetteveno di rendere una riproduzione statica in un modello R/C.
Il sistema utilizzato per rendere R/C il modello è il sistema di zavorra R-CABS, ovvero a ricircolo d’aria compressa. Il sistema si compone principalmente di un tubo che contiene tutta l’elettronica e i meccanismi, il tubo a sua volta, è inserito nel modello.
Il sistema permette l’immersione statica (ovvero il modello si immerge senza la spinta dell’elica) e utilizza l’aria contenuta all’interno del cilindro per riempire una vescica esterna e cambiare la galleggiabilità del sottomarino.
Oltre alla radio, servi, motore e regolatore, c’è un piccolo compressore montato all’interno del cilindro. Esso è collegato alla vescica da tubi che escono attraverso le testate di chiusura. Vi è anche una linea di ritorno che è collegata alla vescica e di una valvola di sfiato all’interno del cilindro.
Quando il sistema si trova nella sua condizione di base, la vescica di gomma è vuota e il cilindro è dotato di aria all’interno. Il Sub si immerge.
Quando si attiva il compressore l’aria nel cilindro viene trasferita alla vescica lasciando il vuoto nel cilindro. Il sub salirà in superficie.
Quando si apre la valvola di sfiato, il vuoto nel cilindro aspirerà l’aria della vescica all’interno del cilindro. La vescica, quindi, si sgonfia e il sub torna a immergersi.
Si tratta di un sistema molto semplice che non necessita di gas supplementare al di fuori di quello imbarcato per operare.
La forma dello scafo ha consentito di utilizzare a pieno lo spazio interno. Il tubo a tenuta è stato realizzato in quattro sezioni con un tubi in plexiglass diam. 60 - 50 - 40 mm.
Le sezioni poppiera e prodiera, i tappi intermedi, sono stati ricavati da un tondo pieno di Nylon lavorate al tornio.
La trasmissione è stata fatta utilizzando un tubetto di ottone da 3 x 2 mm con un assale in acciaio da 2 mm con filetto M2 per l’elica a 5 pale.
Anche il giunto di trasmissione elastico è stato fatto in ottone al tornio
Comandi abilitati 4:
- Timone di direzione
- Timoni di profondità posteriore
- Pompa di immersione/emersione
- Regolatore / invertitore di velocità
Elenco componenti:
- 3 microservi Graupner C-1041 per i timoni di direzione, profondità e per ilcompressore/valvola di sfiato
- 1 interruttiore magnetico autocostruito
- 1 regolatore di velocità Graupner Micro 4
- 1 microcompressore 3V
- 1 microswitch
- 1 ricevente Hitec a 4 canali con Fail Safe
- 1 motore GW/LPS-B2C
- 2 Soffietti piccoli Graupner
- 1 Batteria Li-Po 2s1p 1300mA - 7,4 V
Descrizione della costruzione:
Lo scafo della scatola di montaggio è diviso secondo un piano orizzontale da prua a poppa. Questo taglio è stato usato come apertura per futuri interventi di manutenzione sul modello e per permettere l’estrazione/inserimento del tubo di plexiglass. I due pezzi sono teuti insieme da due viti.
La parte inferiore è in due metà, divisa secondo un piano verticale. Che sono state incollate con un rinforzo in resina.
I timoni di profondità posteriori e il timone garantiscono la governabilità del modello, i piani anteriori servono solo come trim (io li uso in posizione neutra).
La vela del sottomarino è stata scavata il più possibile per permettere la fuoriuscita dell’aria per l’immersione.
Partendo da poppa troviamo il tappo con le aperture per l’uscita dell’assale e dei tiranti dei timoni, sul tappo vi è fissato anche il motore elettrico. Per l’uscita dei tiranti ho usato i soffietti piccoli della graupner incollati, per l’uscita dell’assale ho usato una guarnizione elastica a labbro (avevo provato anche con dei cuscinetti a sfere con interposto del grasso ma non garantivano una tenuta ottimale). In questa sezione ho utilizzato il tubo di plexiglass da 40mm.
Tutta la parte elettronica, servi, ricevente, regolatore, ecc. sono sostenuti da una basetta in legno fissata al tappo intermedio posteriore. In questo modo è possibile sfilare tutta l’elettronica in un sol colpo. il tubo utilizzato è il 60mm.
Si arriva al tappo centrale sul quale sono fissati il servo che comanda il compressore/valvola.
Successivamente al tappo centrale troviamo la cassa di immersione con la vescica di gomma.
Arriviamo al tappo intermedio anteriore che separa la cassa di zavorra dal comparto betterie e dall’interruttore magnetico autocostruito. Quest’ultimo è un "aggeggio" mooolto utile per accendere la radio con il modello completamente chiuso pronto all’uso. La zona delle batterie è fatta con il tubo da 50 mm.
La messa punto:
Dopo numerose prove (............e naufragi) nella vasca da bagno, sono riuscito a metterlo a punto. Di seguito alcune foto fatte il giorno del varo al Lago di Codana.
Il modello era "nudo" senza verniciatura e aveva ancora qualche problemino di stabilità laterale e condensa. Per il resto si è comportato molto bene.
La condensa che si forma all’interno del tubo può provocare qualche problemino all’elettronica. Per evitare che la condensa vada a "spasso" per il tubo ho messo un piccolo pezzo di .........spugna.
In questo modo l’acqua rimane imprigionata e non può fare troppi danni.
Usando il modello però, ho scoperto un problema del plexiglass; È fragile quasi come il vetro, è sensibile alle temperature, viene aggredito dall’alcool e si crepa molto facilmente.
Ho deciso quindi che, quando il modello è in "porto", il tubo di plexiglass lo conservo completamente smontato con i tubi avvolti in carta o stracci e per pulirlo uso solo acqua tiepida (se serve).
|
Alessio M. |
|
 |
 |
|



















